Bonjour à tous,
Je souhaite bon courage moi aussi à ceux qui ont des problèmes. Effectivement, il faut faire attention en enfonçant les fiches dans les prises, à ne pas tordre les broches, et aussi à bien enfoncer les fiches à fond dans leur emplacement. On peut parfois croire qu'elles sont bien enfoncées, alors que ce n'est pas le cas.
Et félicitation à ceux pour qui tout marche ! J'espère être dans ce cas à la fin du montage.
N'ayant pas encore reçu le dernier colis, voici le montage du N° 97, avec justement, le câblage du droïde :

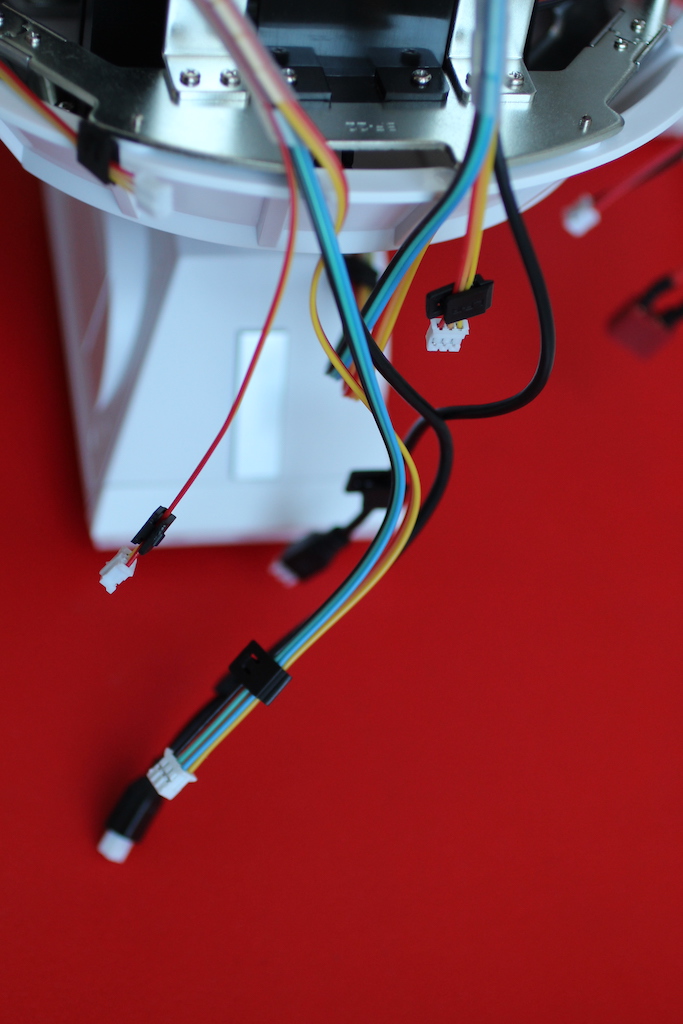
On commence par poser les étiquettes en plastique sur les câbles des différents éléments du robot, en suivant bien les instructions du livret. Attention à ne pas inverser les câbles des cotés droit et gauche. Les étiquettes commençant par R (Right) vont sur les câbles de droite, celles commençant par L (Left) vont sur les câbles de gauche.
Voici quelques étiquettes posées :

J'ai eu un petit soucis avec l'étiquette d'un capteur de position de la tête. Elle s'est cassée en deux.
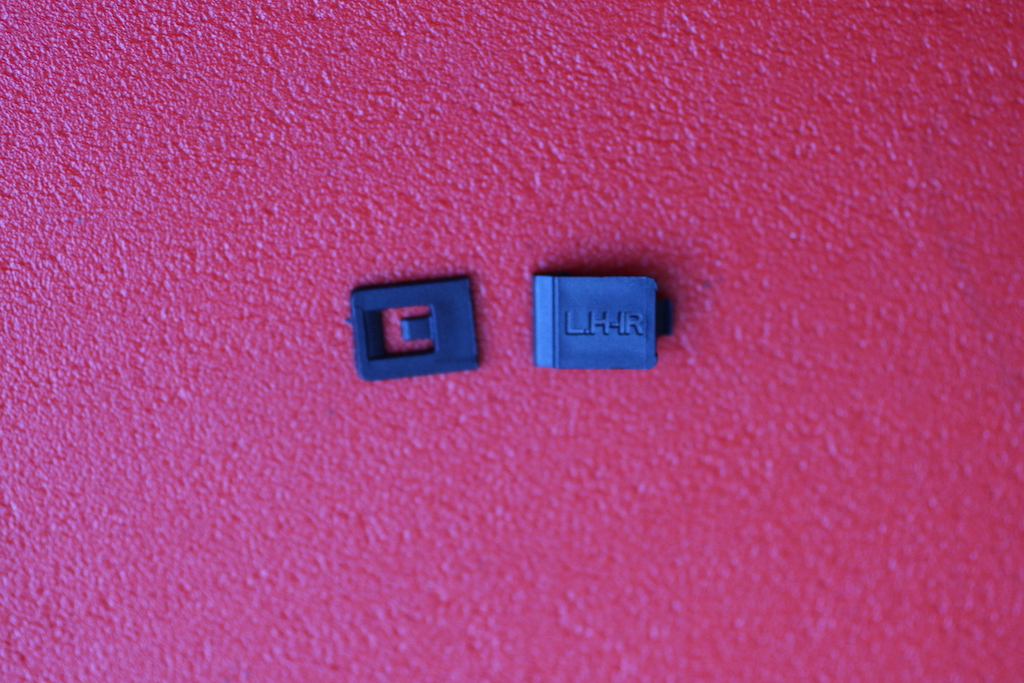
Pas grave, je ferai tenir avec du ruban adhésif le morceau avec le nom gravé sur le câble.
On pose aussi des étiquettes sur le boitier de piles :

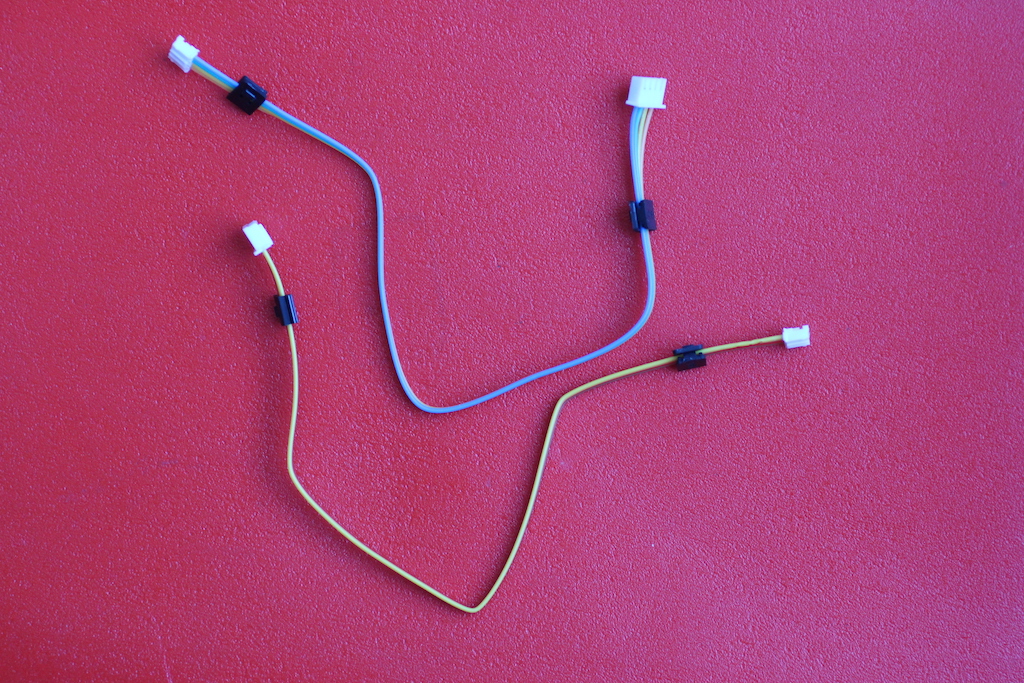
Ainsi que sur 2 câbles fournis avec le N° 53, et qui ont servi lors des tests des capteurs des jambes :
On fixe le couvercle du boitier de piles avec 2 vis noires ø 2,3 x 6 mm :

On retoune le robot et on ouvre la trappe du compartiment du boitier de piles en dévissant les 2 vis imperdables :
On remet le robot à l'endroit et on enfile le boitier à piles, en commençant par les câbles, dans son logement :
Une fois le boitier en place, on peut revisser les 2 vis de la trappe avec le petit tournevis bleu fourni il y a quelque temps.
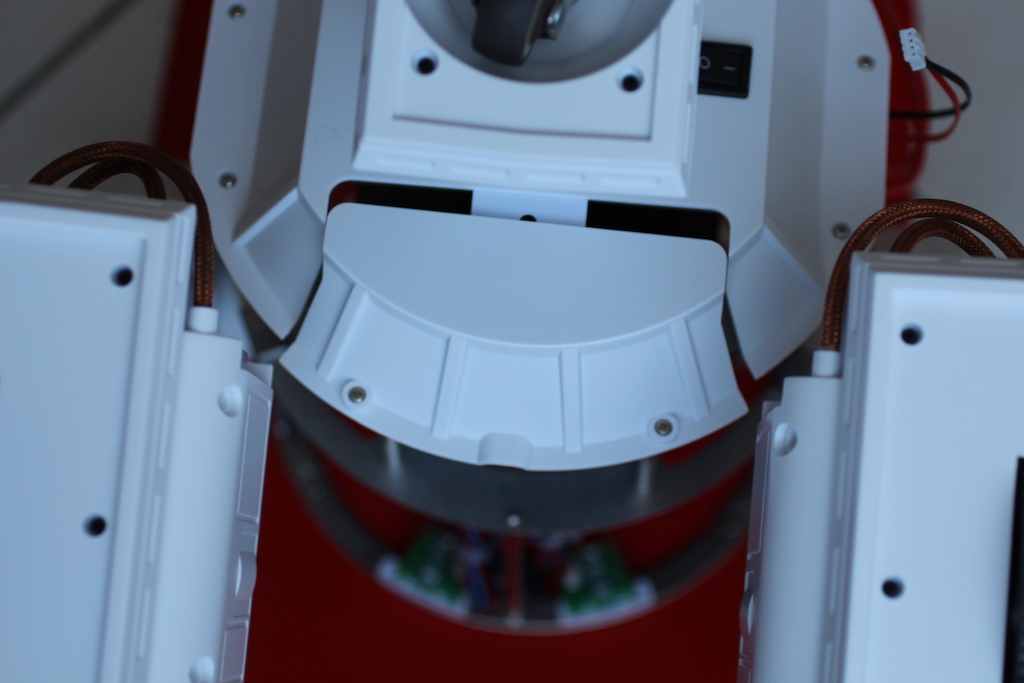
Avant d'attaque le câblage, j'ouvre une parenthèse : Est-ce que c'est moi qui n'ai pas les yeux en face des trous ? ou bien est-ce que Altaya a omis de nous dire de fixer la partie arrière du support des circuits sur la carcasse ?

J'ai donc fixé cette patte avec 2 vis argentées ø 2,5 x 4 mm, comme pour la patte avant.
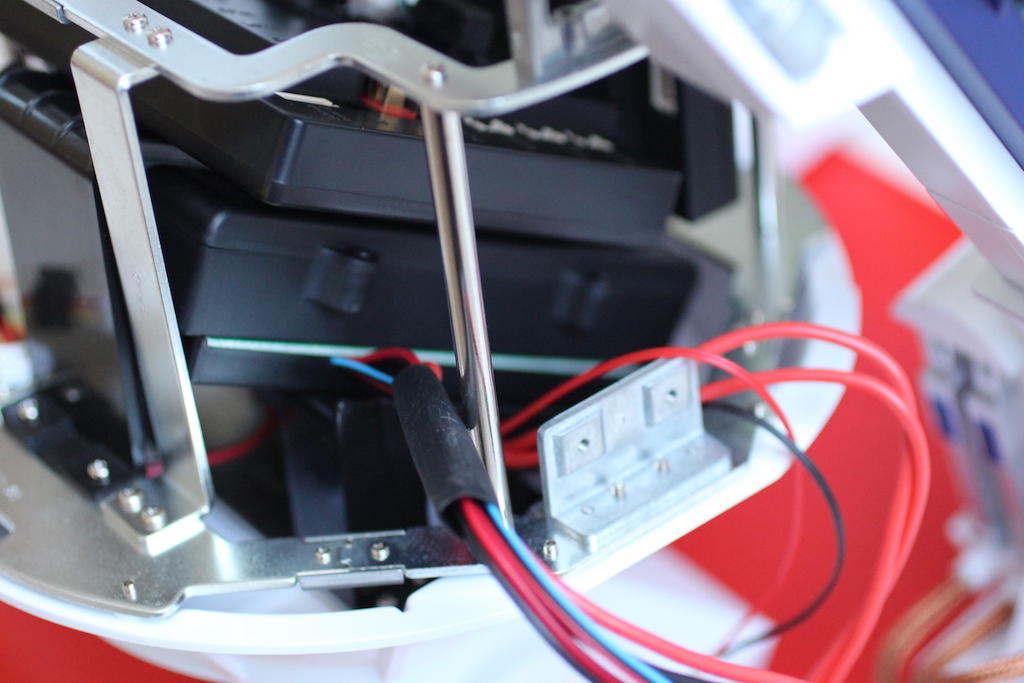
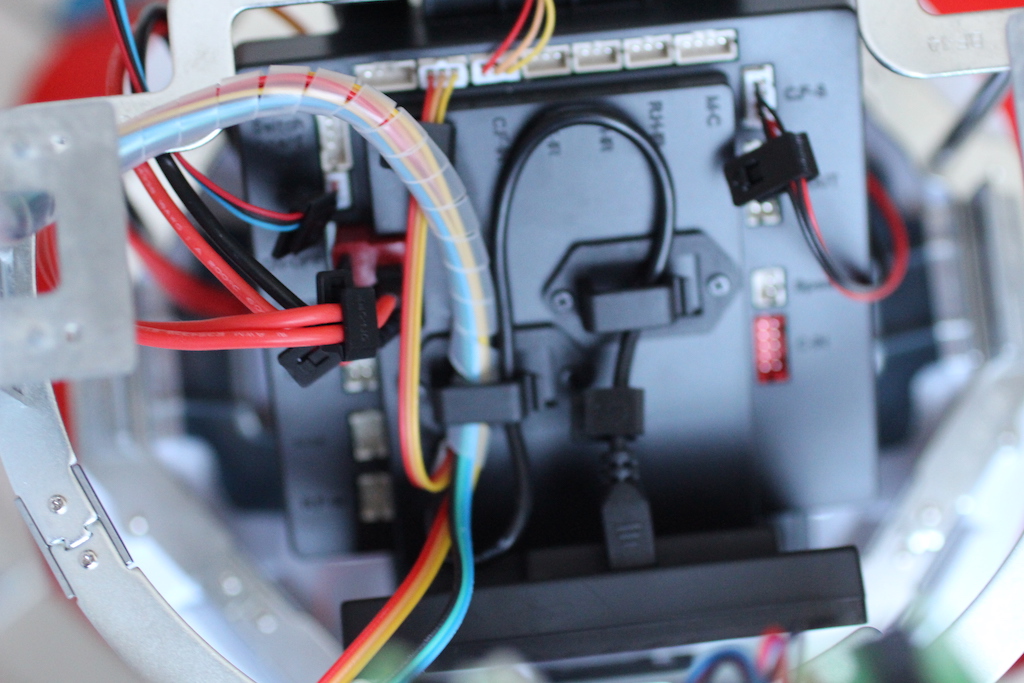
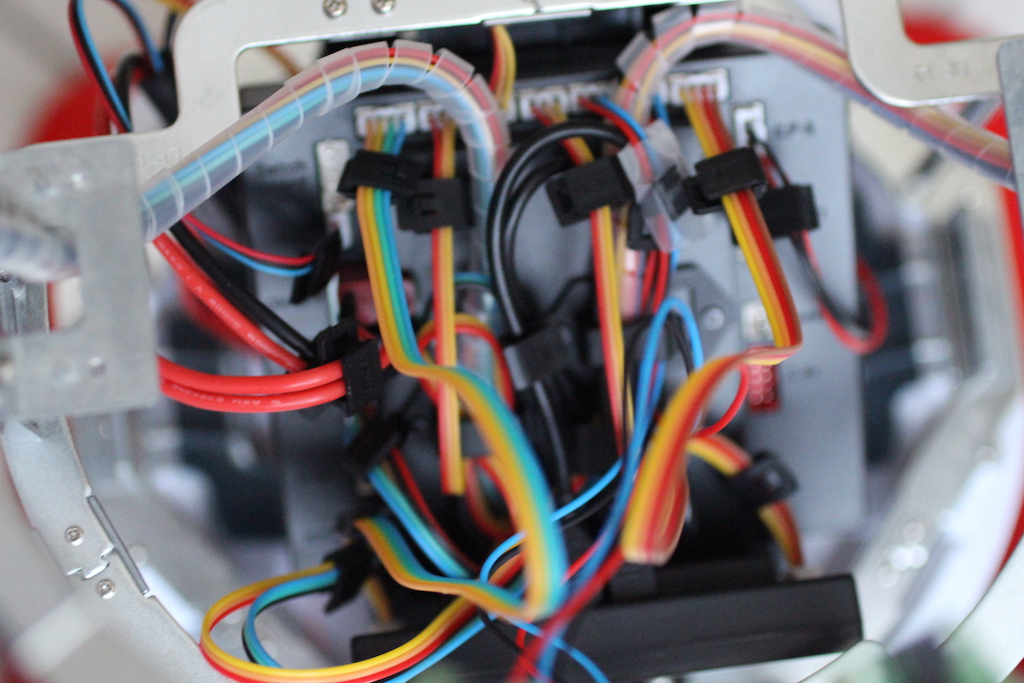
Maintenant, je vais vous montrer ce qu'il ne faut pas faire : J'ai relié les prises non étiquetées avec les fils rouge/noir sur l'avant du robot :
ERREUR ! Si on fait comme cela, on ne pourra plus sortir le boitier pour y mettre les piles. Il faut donc faire passer les fils sous le support des circuits pour laisser le maximum de "mou" dans les fils.
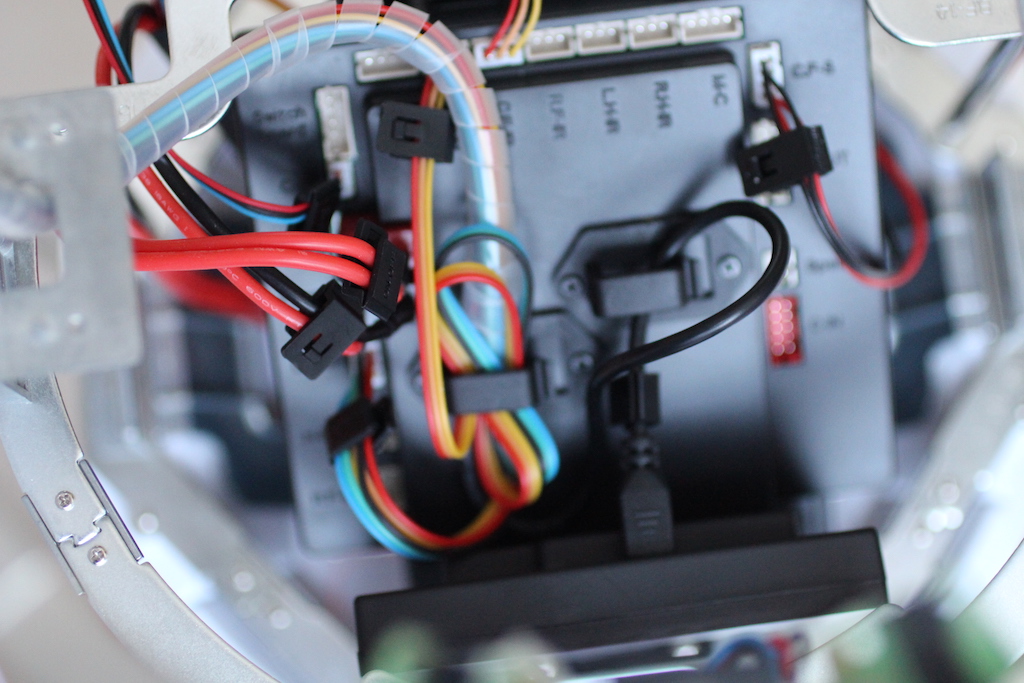
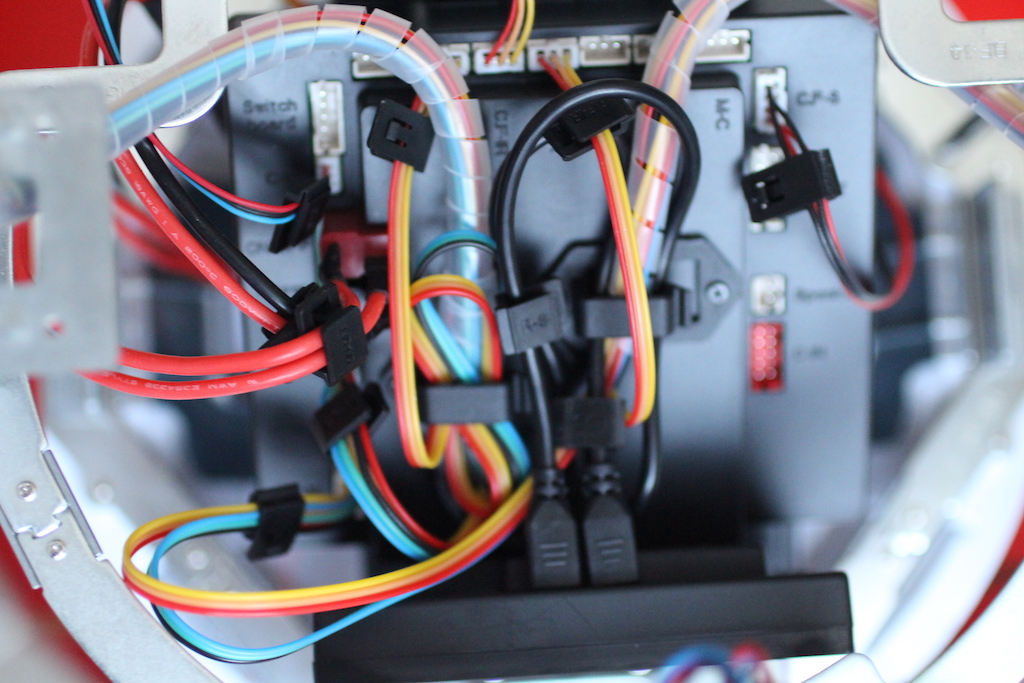
On continue en branchant les fils dans l'ordre indiqué sur la notice.
C.F-S :
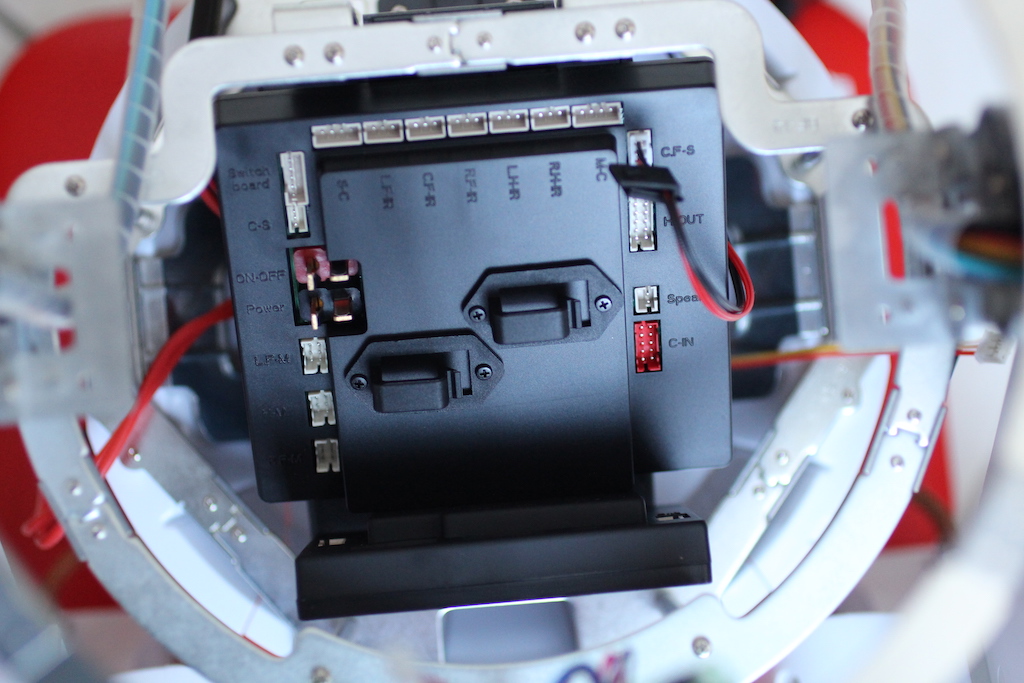
C.F-IR :
C-S :
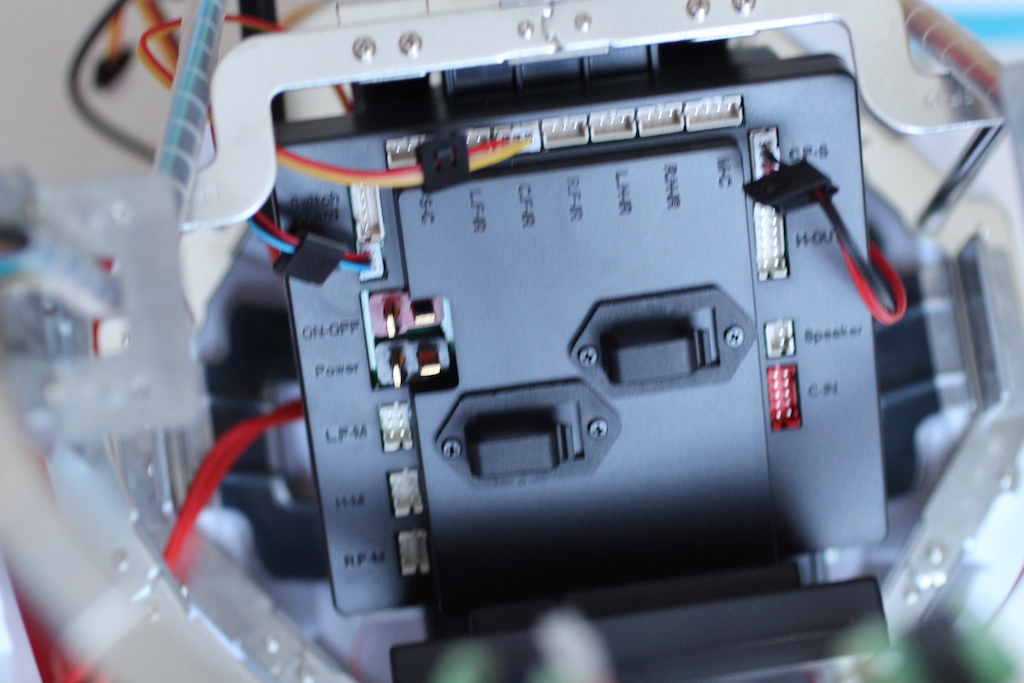
La prise repérée ON-OFF (elle est dure à enfoncer) :
La prise repérée Power (elle est du même type que la prise ON-OFF et aussi dure à mettre en place) :
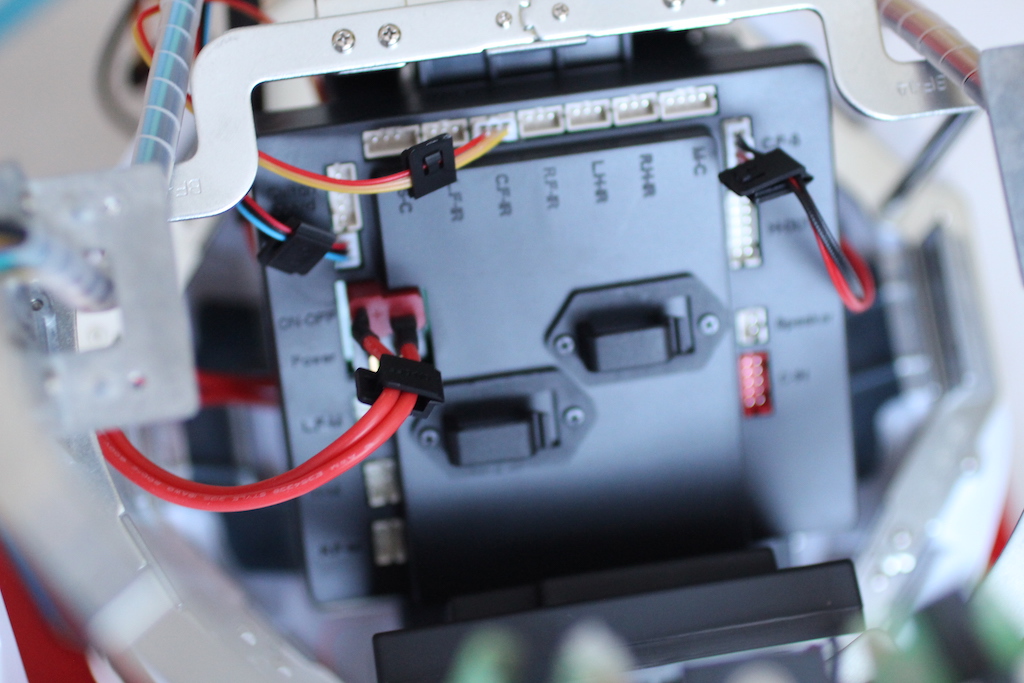
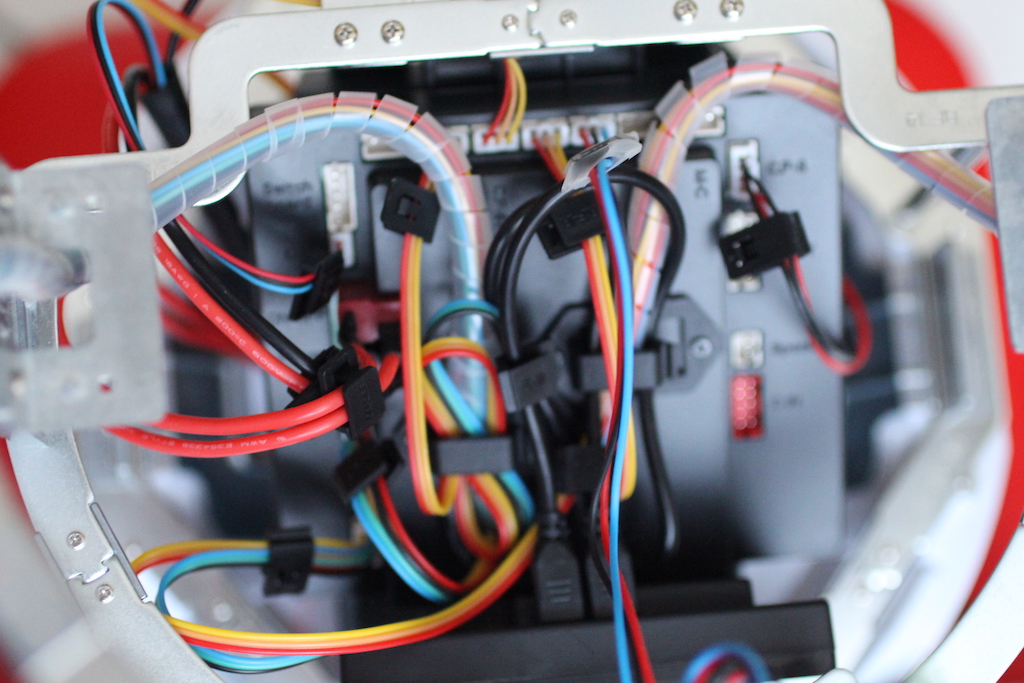
Pour les câbles venant des jambes, il faut faire remonter le serpentin en plastique transparent qui les maintient, au maximum vers l'épaule, de façon à avoir une longueur de fil suffisant pour brancher les prises.
On passe le câblage de la jambe gauche sous une agrafe du boitier du MC, et on branche L.F-IR :
On fait passer le câble noir L-S dans les 2 agrafes et on le connecte :
L.F-M :
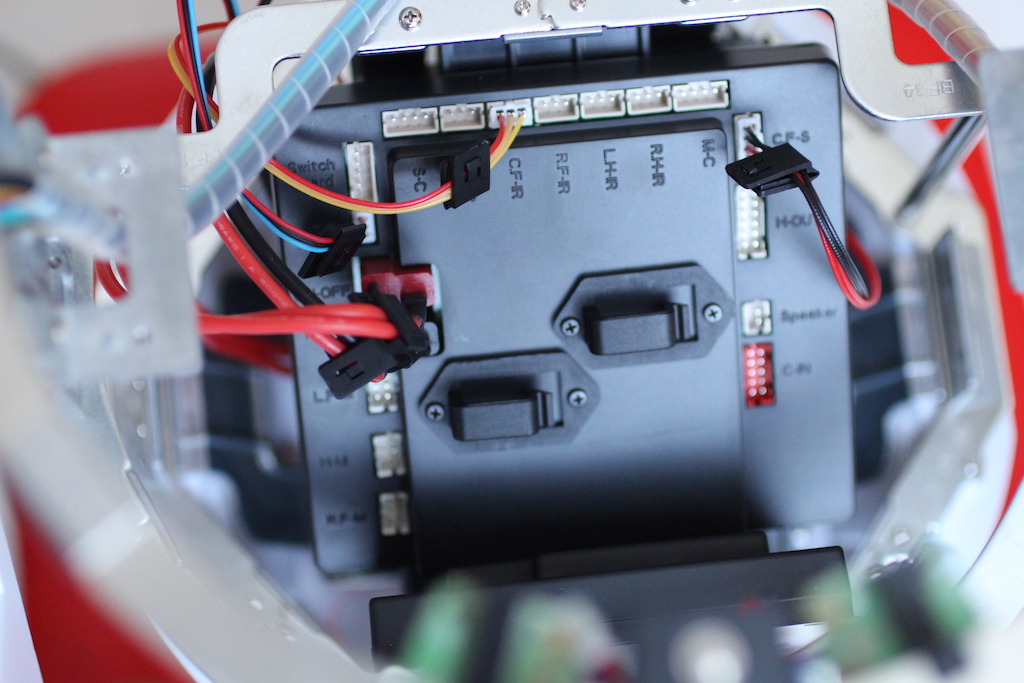
On passe le câblage de la jambe droite sous l'autre agrafe du boitier du MC, et on branche R.F-IR :
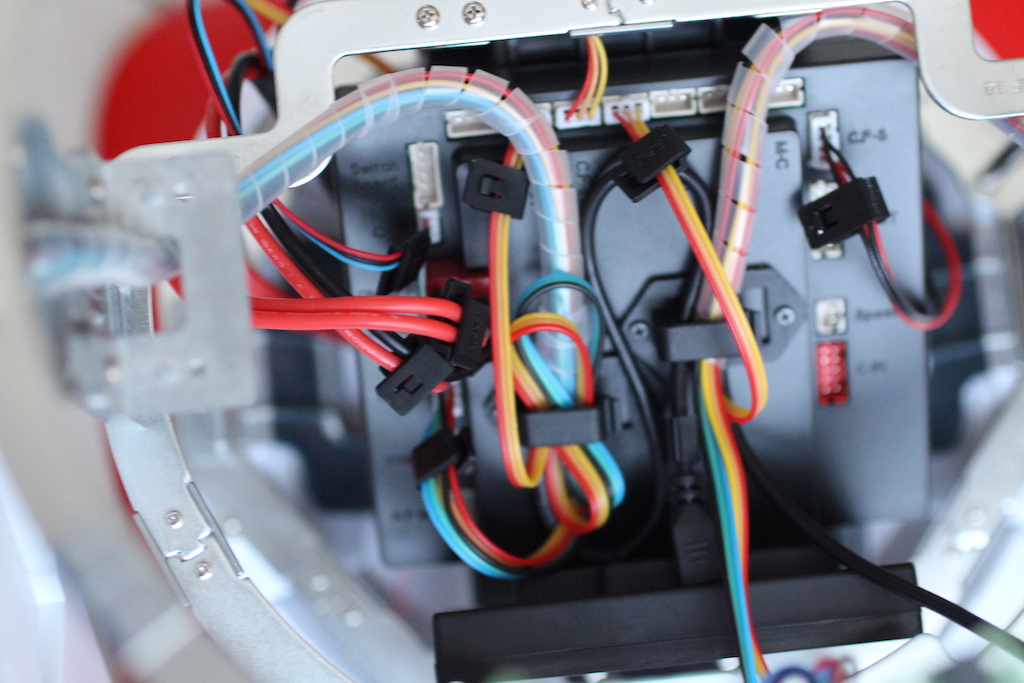
R.F-M après l'avoir fait passer sous le câble L-S :
R-S :
On regroupe le câblage sous les agrafes pour que ce soit plus propre.
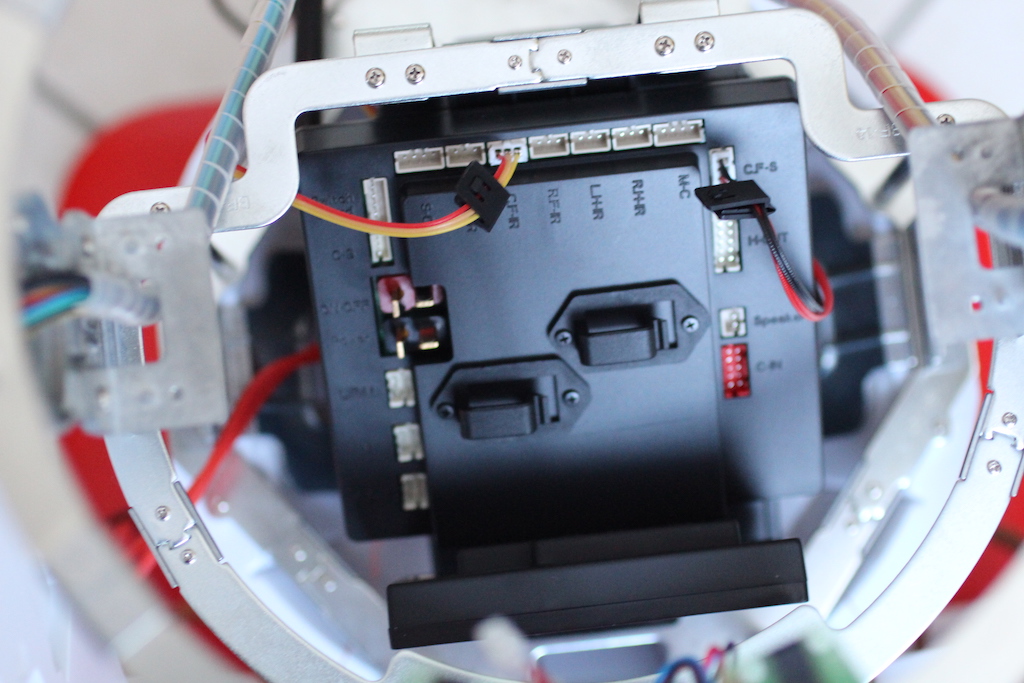
Maintenant, les câbles des capteurs de position de tête :
L.H-IR :
R.H-IR :
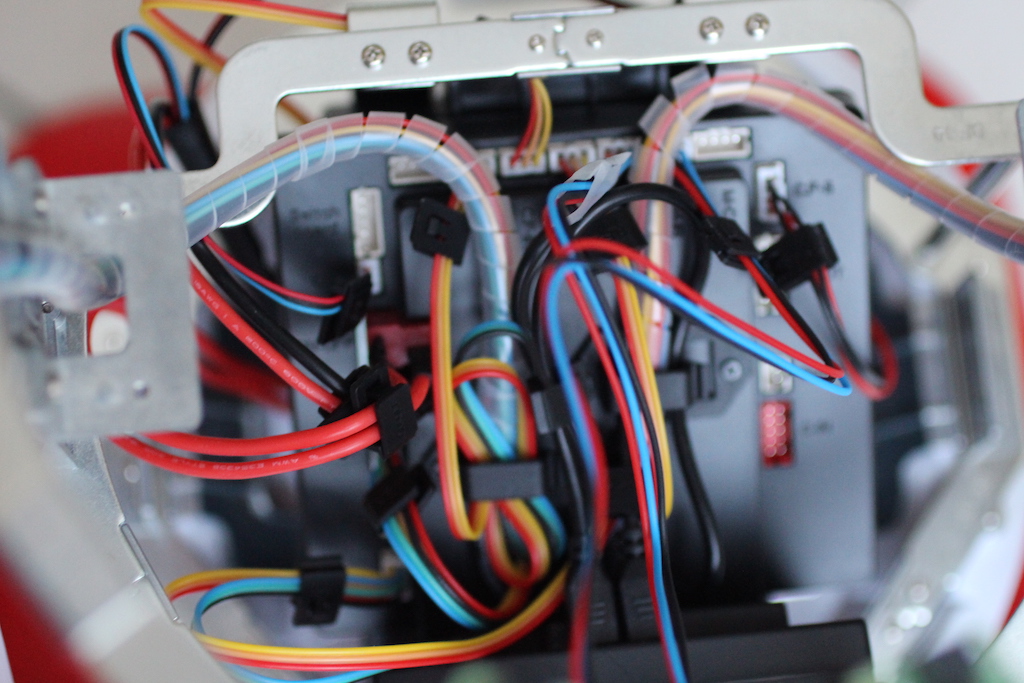
Maintenant, les 2 câbles fournis avec le N° 53 :
Câble M-C :
Câble S-C :
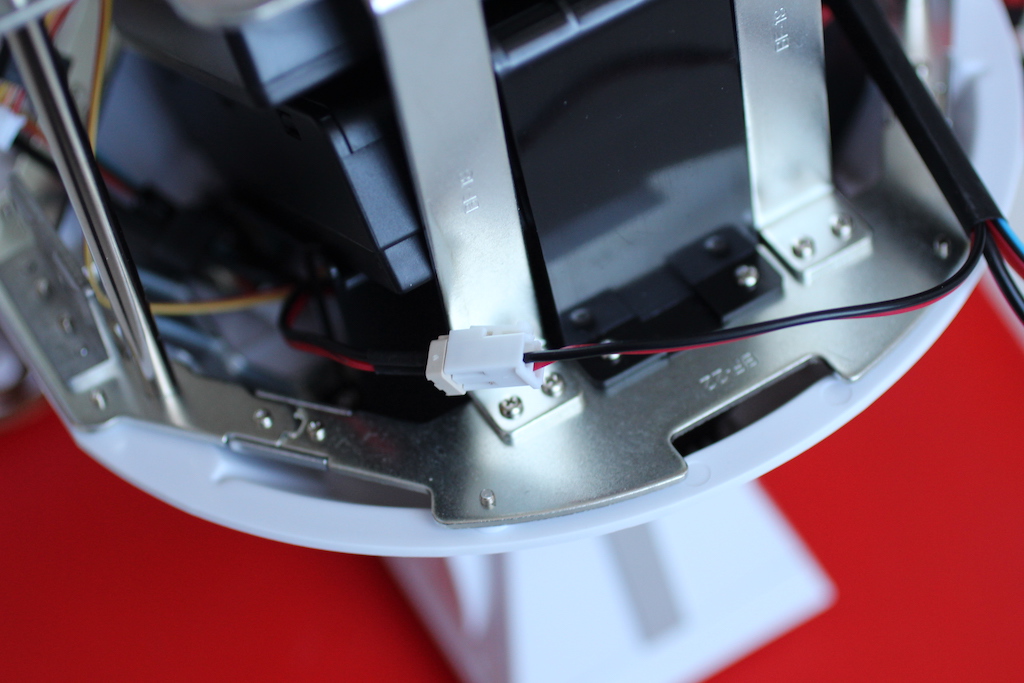
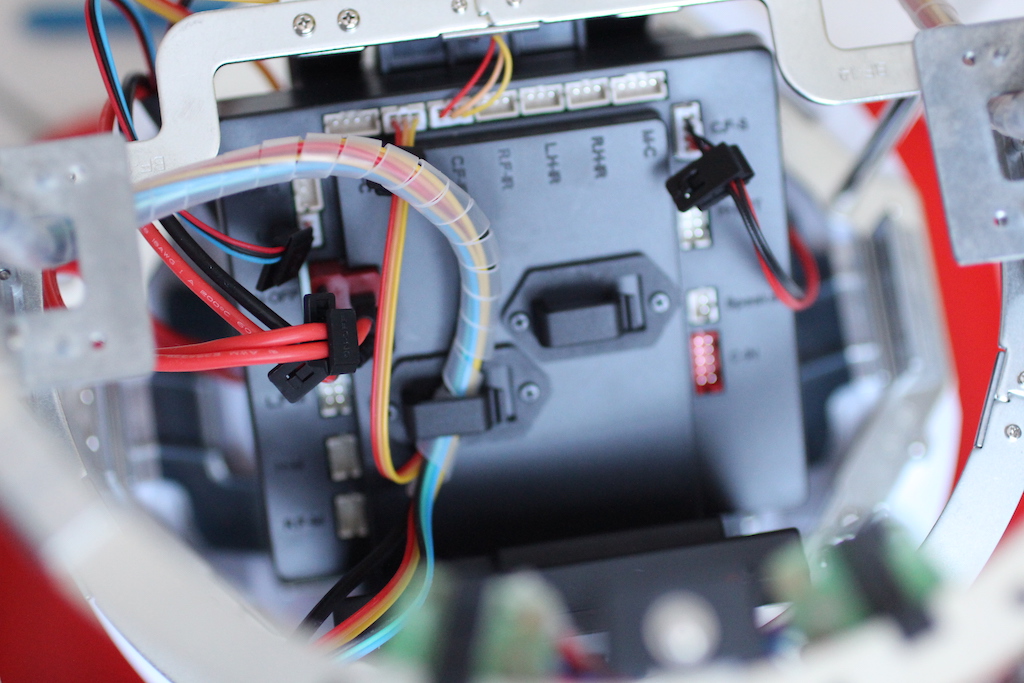
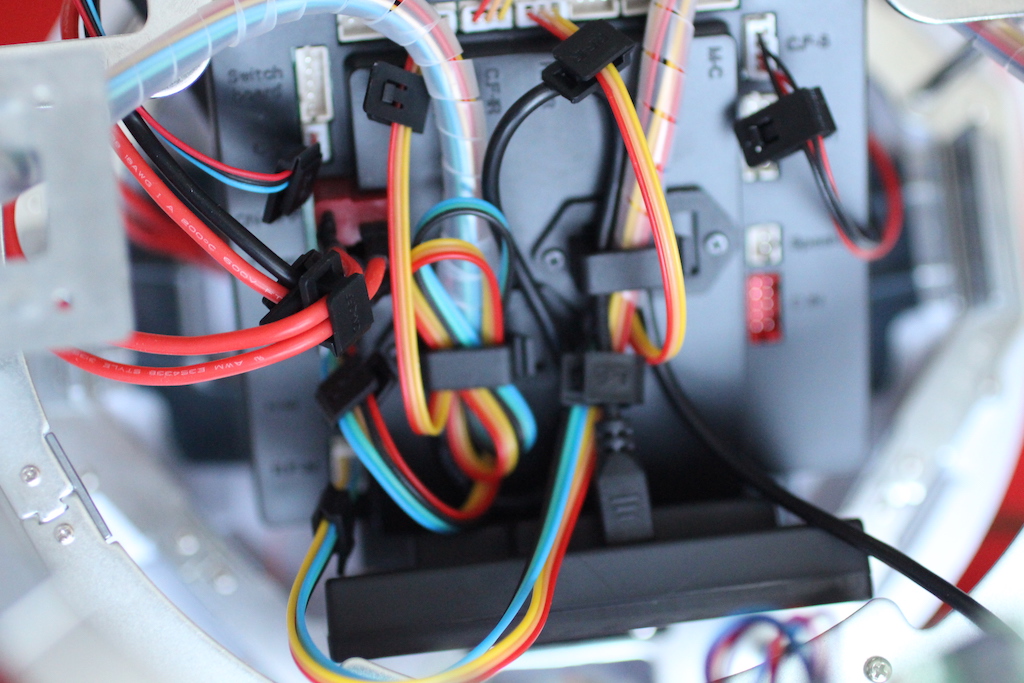
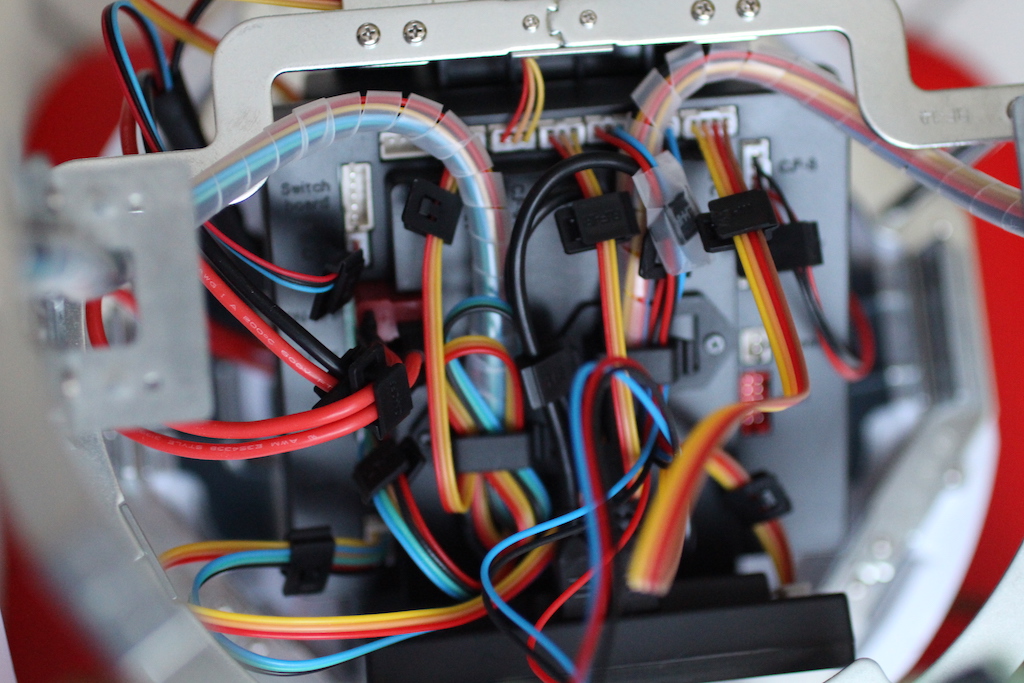
Le câblage est terminé, ouf ! On vérifie que l'on peut sortir le boitier de piles complètement de son logement. Si c'est bon, on peut fixer les câbles.
On attache les câbles de la jambe droite, C.F-S et M-C sur le cadre avec 2 des rilsan fournis :
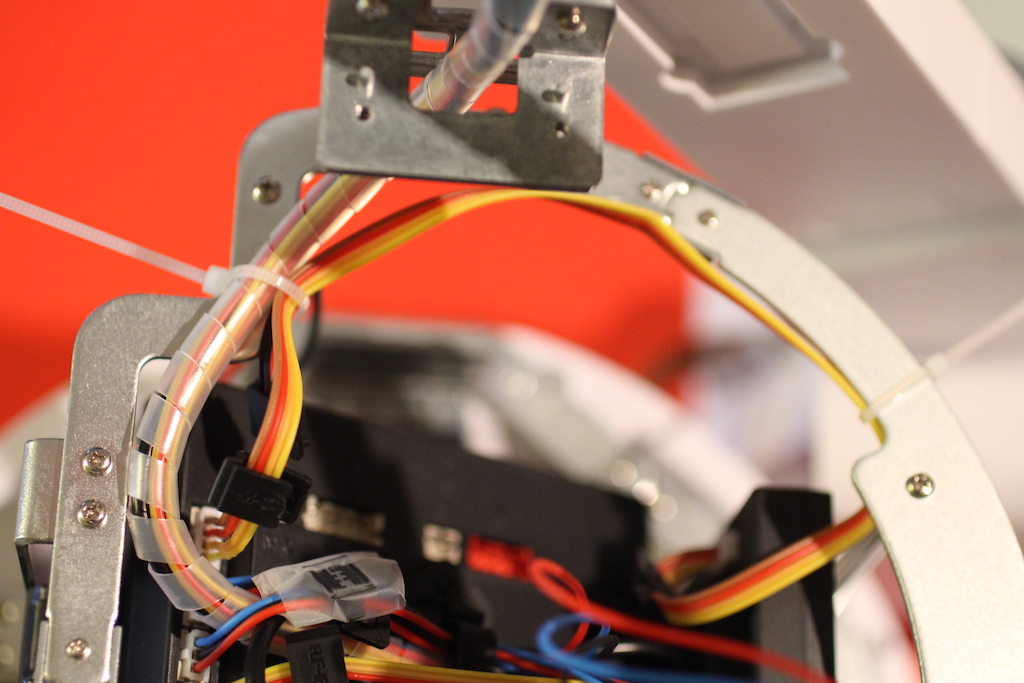
Même chose de l'autre coté avec les câbles de la jambe gauche et S-C :

Et pour finir, les 2 câbles des capteurs de position de tête :
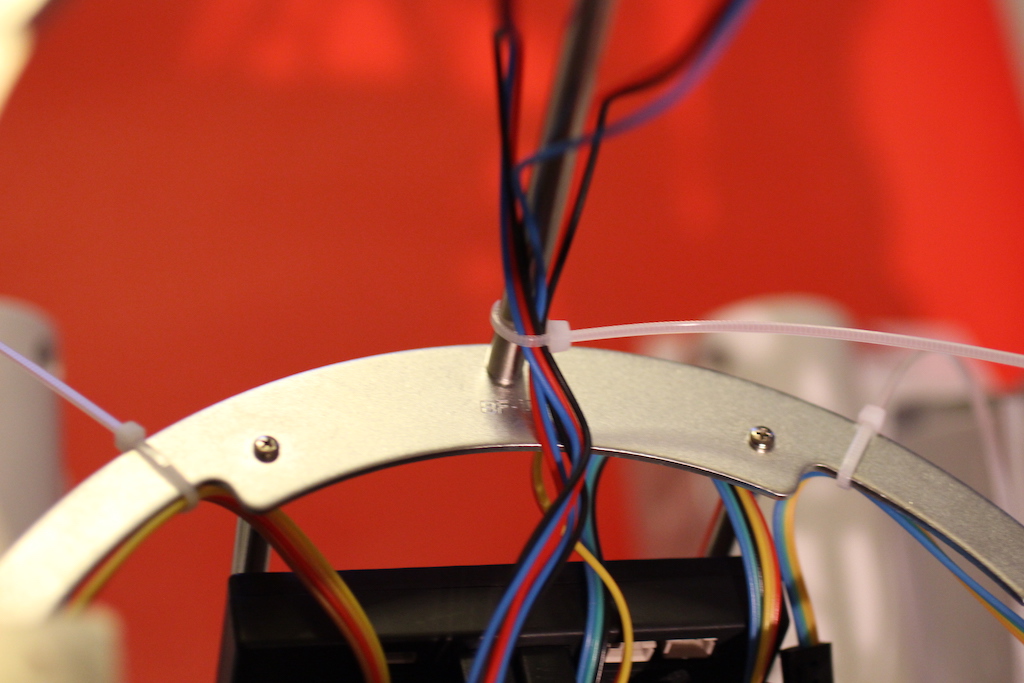
Il ne reste plus qu'à couper les collier rilsan à ras.
Terminé pour ce numéro. A la prochaine...







 ..et donc rien à voir avec ces histoires de piles protégées ou pas!!!
..et donc rien à voir avec ces histoires de piles protégées ou pas!!!